Kramers tricopter step by step: Difference between revisions
Jump to navigation
Jump to search
No edit summary |
No edit summary |
||
| Line 13: | Line 13: | ||
- could glue | - could glue | ||
- zip tie in place | - zip tie in place | ||
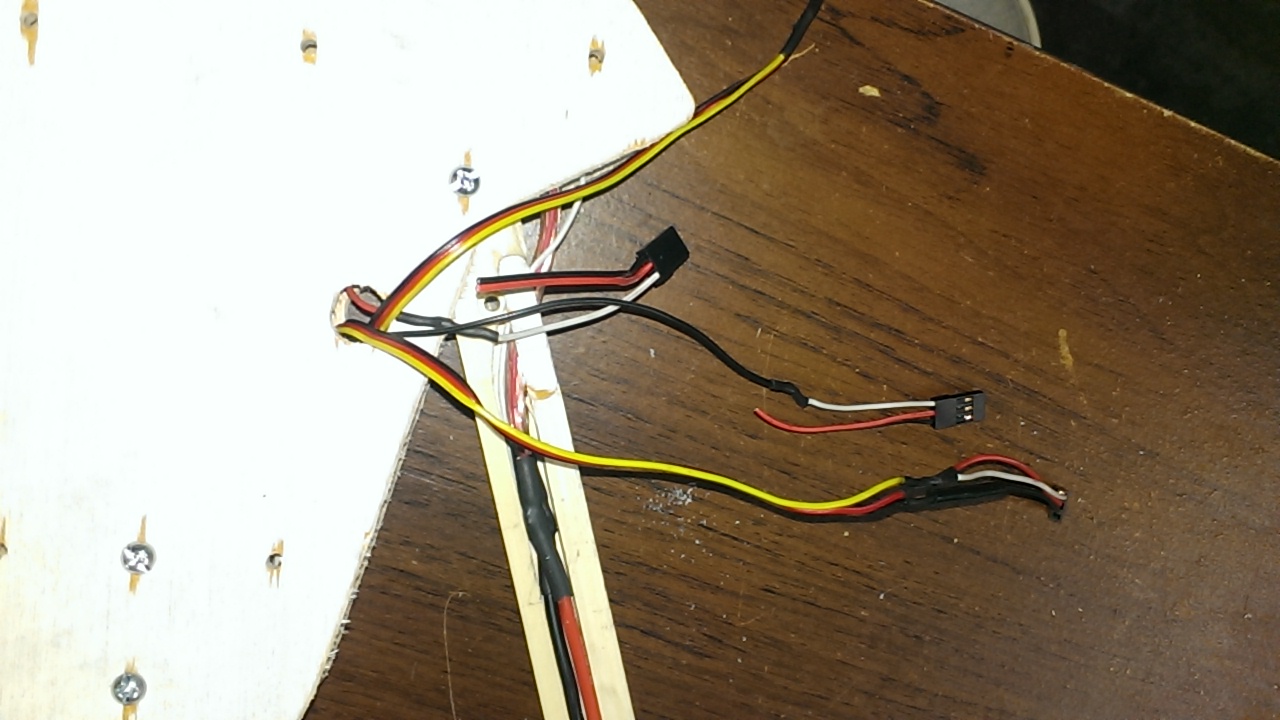
- [[File:Kramer's Tricopter Photo11.jpg | - [[File:Kramer's Tricopter Photo11.jpg]] | ||
- Zip tie and connect speed control | - Zip tie and connect speed control | ||
- will need to determine direction after build by running the motor and noting direction so don't make permanent | - will need to determine direction after build by running the motor and noting direction so don't make permanent | ||
Revision as of 21:28, 31 January 2015
Kramer's Documentation at end of day one 1/31/15 Tricopter Build
- Legs
- sanded Legs
- Assemble Motors
- attach the bottom braket
- get counter sink side correct
- Attach 2 non-servo motors to legs
- opposite side of screw holes
- align wires with opening
- use small cutout to enclose wires within leg slot
- could glue
- zip tie in place
-  - Zip tie and connect speed control
- will need to determine direction after build by running the motor and noting direction so don't make permanent
- photo 2
- drill and file 3D printed gimble mount
- use a screw and glue the end to make gimble pivot
- photo 3
- use super glue
- screw motor on 3D printed mount
- may need to drill to fit
- align wires away from base end
- photo4
- Attach servo
- use drill to reverse counter sink screw hole to get a flush connection
- cut two edges of servo star to fit
- ensure full range of motion and attach star to servo
- superglue to gimble
- photo5
- Attach gimble and servo to leg
- Found out I made a mistake in how the wires were aligned with cutout on leg
- inscrewed and screwed
- use zip ties
- used super glue for spacer after zip tie
- photo6
- zip tie and connect speed controller
- Zip tie and connect speed control
- will need to determine direction after build by running the motor and noting direction so don't make permanent
- photo 2
- drill and file 3D printed gimble mount
- use a screw and glue the end to make gimble pivot
- photo 3
- use super glue
- screw motor on 3D printed mount
- may need to drill to fit
- align wires away from base end
- photo4
- Attach servo
- use drill to reverse counter sink screw hole to get a flush connection
- cut two edges of servo star to fit
- ensure full range of motion and attach star to servo
- superglue to gimble
- photo5
- Attach gimble and servo to leg
- Found out I made a mistake in how the wires were aligned with cutout on leg
- inscrewed and screwed
- use zip ties
- used super glue for spacer after zip tie
- photo6
- zip tie and connect speed controller

- Put the screws in a center piece and attach legs putting the gimbled leg in the center
- use shorter 1 1/4 inch screw on inside for gimbled leg - attach so that the motors face down and the wires are accesable - photo7
- connect wires together in middle using solder and speaker wire
- pigtail all negative and positive from the speed controllers - cut and strip black and red wires - cut and strip speaker wire - cut shrink wrap and solder wire red to red black to black - photo8 - lighter for shrink wrap - combine all neg and wire to neg for final wire - do the same for pos - don't forget skrink wrap(large) - Extend all control wires - only the white wire from the two legs without the gimble - all three from the gimble - leave about 4 inches past the hole through the center section to the top - takes a while; don't forget the shrink wrap - attach the top plate - I messed up the side I soldered the large wires and had to flip the legs to make the bottom plate the top - photo11 - photo10